El talento estudiantil de CETYS Universidad continúa posicionándose en escenarios globales. En esta ocasión, Hiram Zúñiga, estudiante de octavo semestre de Ingeniería en Ciencias Computacionales en Campus Tijuana, obtuvo el 3.° lugar en el hackathon internacional de computación cuántica |Y⟩Cuántico (YQuantum), organizado por Yale University.
YQuantum es considerado uno de los hackathons más relevantes en el ámbito de la computación cuántica a nivel mundial. Es impulsado por el grupo de Computación Cuántica para Estudiantes de Pregrado de Yale en colaboración con el Instituto Cuántico de Yale (YQI), reuniendo a estudiantes de licenciatura y posgrado de distintas universidades del mundo para resolver desafíos de vanguardia en esta disciplina emergente.
 La participación y reconocimiento de Hiram en esta competencia adquiere mayor relevancia al desarrollarse en una institución líder en investigación cuántica, particularmente en áreas como circuitos superconductores y cúbits, donde Yale ha marcado avances significativos a nivel internacional.
La participación y reconocimiento de Hiram en esta competencia adquiere mayor relevancia al desarrollarse en una institución líder en investigación cuántica, particularmente en áreas como circuitos superconductores y cúbits, donde Yale ha marcado avances significativos a nivel internacional.
Este logro refleja no solo la capacidad técnica del estudiante, sino también la formación académica de alto nivel que CETYS impulsa en sus programas de ingeniería, fomentando la innovación y la participación en escenarios globales de alta especialización.
OTROS LOGROS INTERNACIONALES
Como parte de su experiencia reciente en el ámbito tecnológico, Hiram también participó en
, hackathon realizado en la Universidad de California, Merced, del 6 al 8 de marzo, con una duración de 44 horas continuas de desarrollo intensivo. Este evento forma parte de la liga Major League Hacking (MLH), una de las comunidades de hackathons más importantes a nivel mundial.
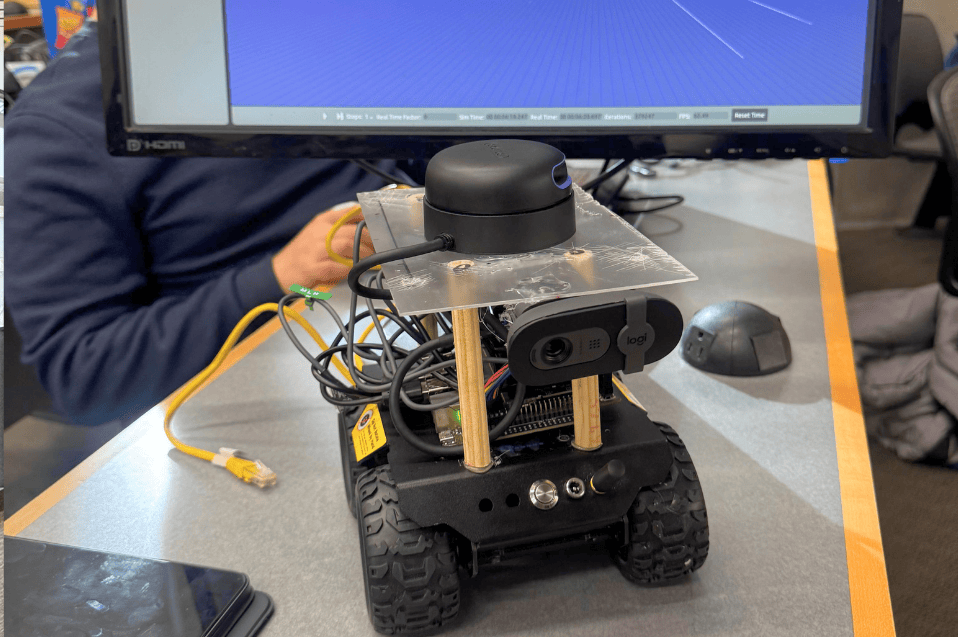
Durante esta competencia, Hiram, junto a su compañero Hugo Manzano, también estudiante de octavo semestre de CETYS—, desarrolló un prototipo de robot de asistencia para personas con discapacidad visual. El proyecto propone una alternativa tecnológica a los perros guía, cuyo costo en Estados Unidos puede superar los 20 mil dólares.
El robot integra una webcam y un sensor LiDAR 360 para percibir el entorno, identificar elementos como semáforos, vehículos y personas, y emitir alertas al usuario. Además, incorpora inteligencia artificial para responder preguntas en tiempo real mediante audio, permitiendo al usuario obtener información sobre su entorno, como su ubicación o lo que tiene frente a sí, ampliando así las capacidades de asistencia más allá de lo que actualmente ofrecen los perros guía.